Zinc Pot Rolls,Zinc Pot Sink Roll,Stabilizer Roll,Roll For Zinc Pot Jiangsu Kinuo Furnace Roller Co., Ltd. , https://www.jskinuoroller.com
1 pure proportional effect:
Pure proportional effect, regulator output:
Tout=Δe·(1/δ)
Δe: PID input deviation, that is, the difference between the adjusted value and the fixed value.
δ: Proportional band. 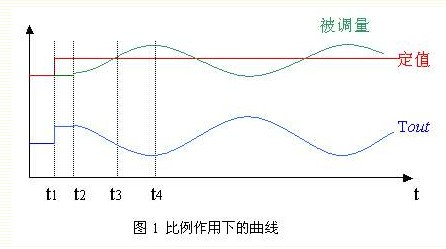
1.1 The effect is related to the amount of change in Δe (1/δ times) and has nothing to do with the static difference. 1.2 Inflection point at the same time;
1.3 The volatility cycle is consistent;
2 points effect:
In some regulators, the integral action cannot be used alone. It must be used in conjunction with other parameters. For the convenience of analysis, the influence of other parameters is not taken into consideration here to analyze the curve under the integral action. 
Because the response of Tout is not obvious in proportion, the time t2 at which the adjustment is started to change lags behind the proportional effect. During the period from t1 to t2, because Tout is constant, that is, Δe does not change, Tout rises at a constant rate, that is, Tout is a straight line. At t2, when the adjusted amount starts to change, the rate of Tout begins to decrease.
At t3, when Δe=0, Tout does not change. Then Δe starts to be positive and Tout starts to decrease.
At time t4, it was adjusted to reach the apex and began to recover, but since Δe is still positive, Tout continued to decrease but the rate began to slow down.
Tout rises again until t5, Δe=0.
This shows that under the integral action, each curve has the following characteristics:
2.1 The integral action has nothing to do with the trend of Δe, and is related to the positive and negative of Δe. The rise and fall of Tout is independent of the size of Δe, and the rate is related to the size of Δe.
2.2 When there are step disturbances in the adjustment, Tout has no step disturbance.
2.3 Tune's trend does not change and the rate slows when it is adjusted to the inflection point.
2.4Tout to the inflection point must be â–³e=0.
3 proportional integral effect:
The proportional integral action is the superposition of proportional action and integral action. In a simple system, the system can be stabilized only by proportional action, but no difference adjustment is possible. Then how to judge the setting of the parameters under the comprehensive effect of improper? The simpler method is to first judge the integral action.
3.1 Incorrect integration parameters:
It is easy to judge that the integral action is too small, that is, if the system is stable, Δe is hardly equal to zero.
System instability may be due to improper proportionality or excessive integration.
As shown in the figure, when there are step disturbances in the fixed value, the proportional action makes Tout have a step disturbance at the same time, and the integral action makes Tout continue to increase. 
As long as the proportional effect is not infinity, or if the integral action is not zero, there will always be a time when the integral action is stronger than the differential action, so that Tout continues to rise from time t2. Then level (t3) and then decrease.
At t5, which is scaled up to the peak, similarly, the proportional action makes Tout also reach the peak (negative), and the integral action makes the final Tout delay backward (t6 moment).
So is the effect of this integral action on the system beneficial or harmful?
The author did not make a deep consideration and felt as if it was harmful.
As already mentioned, in a relatively simple system, the system can be stabilized only by proportional action. As shown in Figure 1, taking t4 as an example, we can't require one step to make the adjusted quantity tend to be stable (as shown in Figure 4). If there is no other disturbance, the adjusted quantity starts to decrease, indicating that Tout is somewhat over-adjusted, because then Need to make a certain amount of callback Tout. Tout did this in proportion. Note If other factors are not considered, the system can be stable as long as the parameters are correct.
However, due to the presence of integral action, Tout's callback was prevented. Taking the moment t5 in Fig. 3 as an example, the integral action makes Tout not only make a callback, but also increases the overshoot. This will inevitably affect the effect of the proportion of the callback. So at this time we hope that the smaller the integral action, the better. However, in order to eliminate the static difference, the integral action is indispensable, so we hope that, under the premise that the static difference can be eliminated, the integral action is weaker. The rough estimate is the delay period of the t6-t5 inflection point. 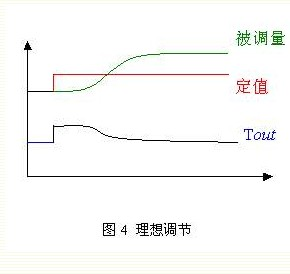
However, the proportions and integrals affect each other. If the proportional effect is too weak, even if the integral action is appropriate, it will cause too much T lag.
3.2 Improper proportionality:
Under constant disturbance, if other disturbance factors are not considered temporarily, and the system is stable before assuming disturbance, if the proportional band is too large, then the variation of Tout unit perturbation is small and adjusted to the fixed value. The speed is also very slow.
When the measured value is disturbed for a short period of time, it is assumed that there is no other factor of interference. If the proportional band is too large, since the amount of change in the unit perturbation of Tout is small, it is difficult to correct the adjusted amount, and it is the first one. Half a week's fluctuations will be great. Of course, the final adjustment will be restored, but at this time Tout has adjusted excessive. Tout is also very difficult to correct for overshoot in the first half of the cycle when the volume is restored, and the Tout overshoot will be greater in the next half cycle. This shows that the curve characteristics brought by the proportional band too small are: 
3.2.1.2 The curves are of divergence or constant amplitude oscillation type. (Is it as I said, hope everyone criticizes)
3.2.1.3 Long cycle of volatility.
In the same situation, if the proportional band is too small, then the disturbance will develop and the proportional effect will play a role in time. The adjustment of Tout will cause the regulation to be suppressed as soon as possible, but this adjustment will overshoot and make the adjustment downward half cycle. Great fluctuations. This shows that the curve characteristics brought by the proportional band too small are:
3.2.2.1 After being modulated by a pulse-like disturbance, the overshoot of the first half cycle will be large.
3.2.2.2 The curve is of divergent or constant amplitude oscillation type. (Is it like I said, I hope everyone criticizes).
3.2.2.3 Short cycle time.
4 differential action:
Differential function, can not be used alone. It is used in lags and inertia. It can adjust the Tout in time when there is a trend of change, but actually there is not enough time to change it. Therefore, the differential action has a reputation for advanced adjustment. Many people tend to think of differential action when their quality is not good. In fact, there are some "forbidden zones" for differential action. To sum up, it has the following characteristics:
4.1 The differential action has nothing to do with the amount of change in Δe, the rate of change of Δe is related to the positive and negative of Δe, and it is related to the change trend of Δe.
4.2 When there are frequent changes in the frequency of adjustment, and these changes do not represent the total change trend of the adjustment (such as the water level adjustment system), the differential effect cannot be used.
4.3 The modulated signal has jitter such as interference. When these jitters are not filtered, the differential action cannot be used.
4.4 When the system does not have a large inertia and lag, it is best not to add a derivative action.
The reason is obvious. The first two items cannot correctly reflect the trend of change. However, the adjustment of the trend can not tell the adjustment is an interference. The last addition plus no differentiation has little effect on the system, simply avoiding possible interference.
The differential action has two parameters: the derivative amplitude KD and the derivative time KT.
After the integral parameter is set properly, if the system is still not stable, it is the wrong scale factor. The determination of proportional parameters has been clarified in various textbooks.
Analysis of the influence of adjustment parameters on the adjustment process
In my many years of work, I discovered that some staff members are not easy to put into automatic control systems for some unusual situations. The reason for this is the influence of adjustment parameters on the adjustment process, and it is not clear. The author also read a large number of related books and found that most of them are not very practical. After reading it seems to understand, encountered difficulties in the analysis of practical problems. Based on past experience, the author summarized some laws and summed them up for expert correction. It can be seen that the output of the regulator is purely proportional to the input deviation. The fixed value is generally unchanged. Under a single PID, each curve changes as shown in the figure. Assume that when the volume is adjusted high, the door should be turned off, that is, the PID is negative. When there is a step disturbance at a fixed value, the regulator input deviation is -Δe. At this point, Tout should also have a step amount Δe·(1/δ), and then it will be adjusted. After a lag period t2, the adjusted amount starts to respond to Tout. Because of the increase in volume, Tout began to decrease. Until t4, Tout began to rise when the adjusted amount began to reply. This shows that under the proportional effect, each curve has the following characteristics: Under the integral action, the response curve of input deviation variation is very different from the proportional action. Assume that when the volume is adjusted high, the control gate should be turned off. When there is a step disturbance at the fixed value, Tout does not make a step change, but starts to increase at a higher rate. After T2, the adjusted response Tout begins to increase. At this time, the proportional effect is caused by the decrease of Δe and the decrease of Tout (as indicated by the dotted line Tout(δ)); however, the former said that the integral action has nothing to do with the trend of Δe, and is related to the positive and negative of Δe. The integral action is still negative due to Δe, so it continues to increase Tout, but the rate is slowed down. The superposition of proportional action and integral action determines the actual direction of Tout, as shown in Figure Tout(δi). In the period of t7-t5 1/4 fluctuation, the proportion is not more than 1/4, that is, T lag=(t6-t5)/t7-t5≤1/3 3.2.1.1 After being modulated by a pulse-like perturbation, the overshoot of the first half cycle will be large.